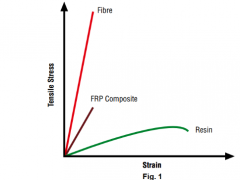

碳纖維增強復合材料(CFRP)因其高強度、低密度和良好的耐腐蝕性,在航空航天、汽車制造、體育器材等領域得到廣泛應用。然而,CFRP的硬度和各向異性特性給其表面加工帶來了挑戰。傳統的手工磨拋方法不僅效率低下,而且難以保證加工質量的一致性。因此,開發高效的機器人磨拋系統,實現CFRP的高質量加工,成為當前研究的熱點。本文旨在探討碳纖維增強復合材料機器人磨拋系統的力位混合控制策略與工藝參數優化方法。

一、碳纖維增強復合材料機器人磨拋系統概述
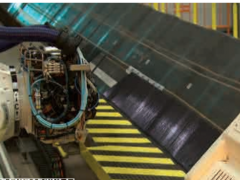
碳纖維增強復合材料機器人磨拋系統主要由工業機器人、磨拋工具、控制系統及傳感器等組成。工業機器人負責執行磨拋任務,磨拋工具則直接作用于CFRP表面,控制系統負責協調機器人的運動與力控制,傳感器則用于實時監測磨拋過程中的關鍵參數。
二、力位混合控制策略
力控制策略
在磨拋過程中,接觸力的大小直接影響加工質量和效率。為了實現恒定的磨拋力,本文采用基于力傳感器的力控制策略。通過實時監測磨拋工具與CFRP表面之間的接觸力,控制系統可以動態調整機器人的運動軌跡,確保磨拋力保持在預設范圍內。
位置控制策略
位置控制策略旨在確保機器人能夠按照預定的軌跡進行磨拋。為了實現高精度的位置控制,本文采用基于視覺伺服的控制系統。通過攝像頭實時監測磨拋工具的位置,并與預設軌跡進行對比,控制系統可以實時調整機器人的運動參數,確保磨拋軌跡的準確性。
力位混合控制策略
結合力控制與位置控制策略,本文提出一種力位混合控制策略。在磨拋過程中,控制系統根據實時監測的接觸力和位置信息,動態調整機器人的運動軌跡和磨拋力,以實現高質量的磨拋加工。
三、工藝參數優化方法
試驗設計
為了研究不同工藝參數對磨拋質量的影響,本文采用正交試驗設計。選取主軸轉速、機器人移動速度、磨拋正壓力、砂紙粒度等關鍵參數作為試驗因素,每個因素設置多個水平,通過正交試驗表安排試驗方案。
響應面法優化
在正交試驗的基礎上,本文采用響應面法(RSM)對工藝參數進行優化。通過構建響應面模型,預測不同工藝參數組合下的磨拋質量,并找出最優參數組合。
驗證試驗
為了驗證優化結果的準確性,本文進行了一系列驗證試驗。將最優參數組合應用于實際磨拋過程中,通過測量加工后的表面粗糙度和材料去除率等指標,評估優化效果。
四、研究結果與討論
通過力位混合控制策略與工藝參數優化方法的實施,本文成功實現了CFRP的高質量磨拋加工。實驗結果表明,優化后的工藝參數組合可以顯著提高磨拋效率,同時降低表面粗糙度,滿足實際應用需求。此外,力位混合控制策略有效提高了磨拋過程的穩定性和可控性,為CFRP的自動化加工提供了有力支持。
本文研究了碳纖維增強復合材料機器人磨拋系統的力位混合控制與工藝參數優化方法。通過正交試驗設計和響應面法優化,成功找出了最優工藝參數組合,實現了高質量的磨拋加工。未來,將進一步研究更加智能的磨拋控制策略,如基于機器學習的自適應控制方法,以提高磨拋系統的靈活性和智能化水平。同時,將探索更多類型的磨拋工具和材料,以拓寬CFRP加工的應用范圍。